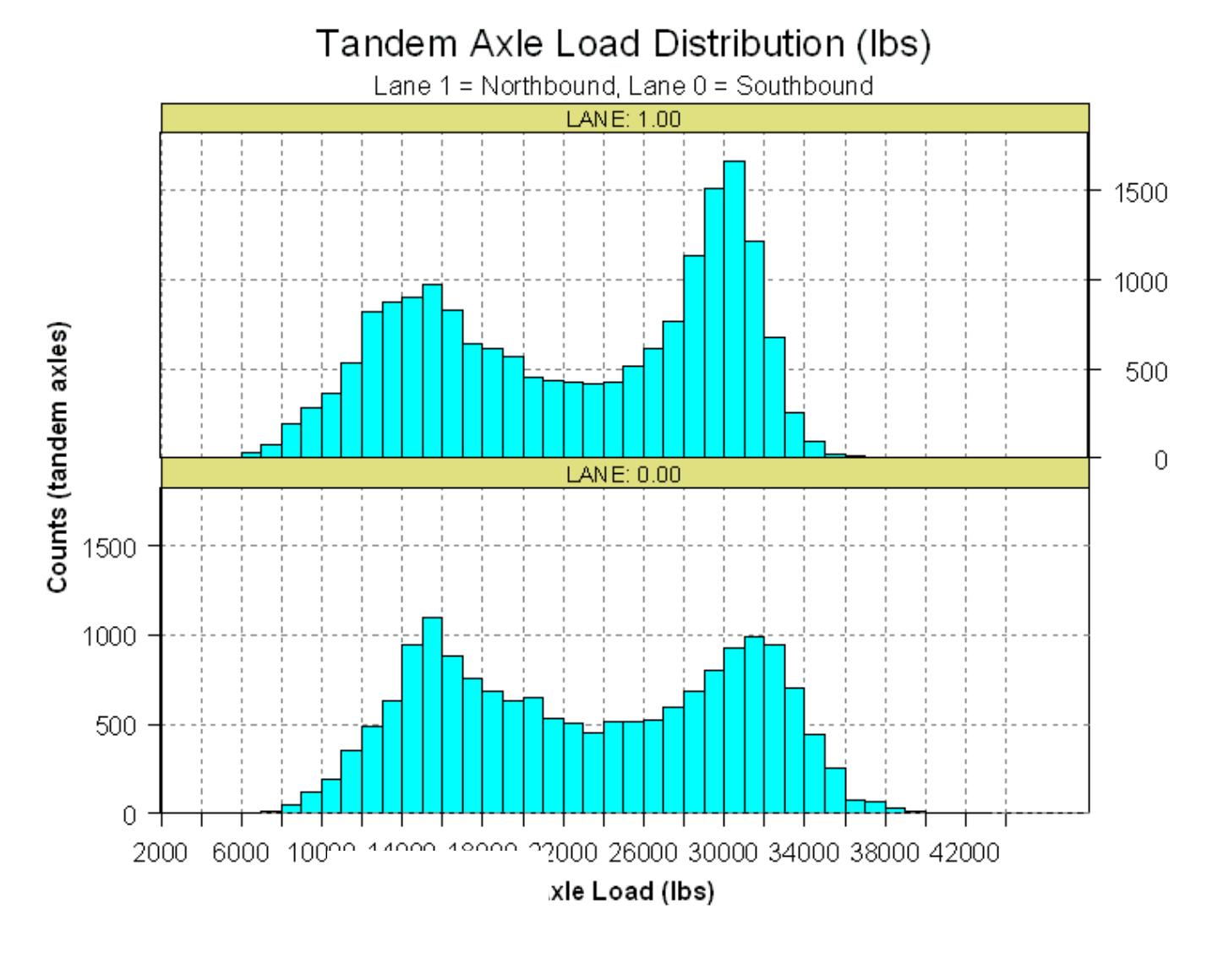
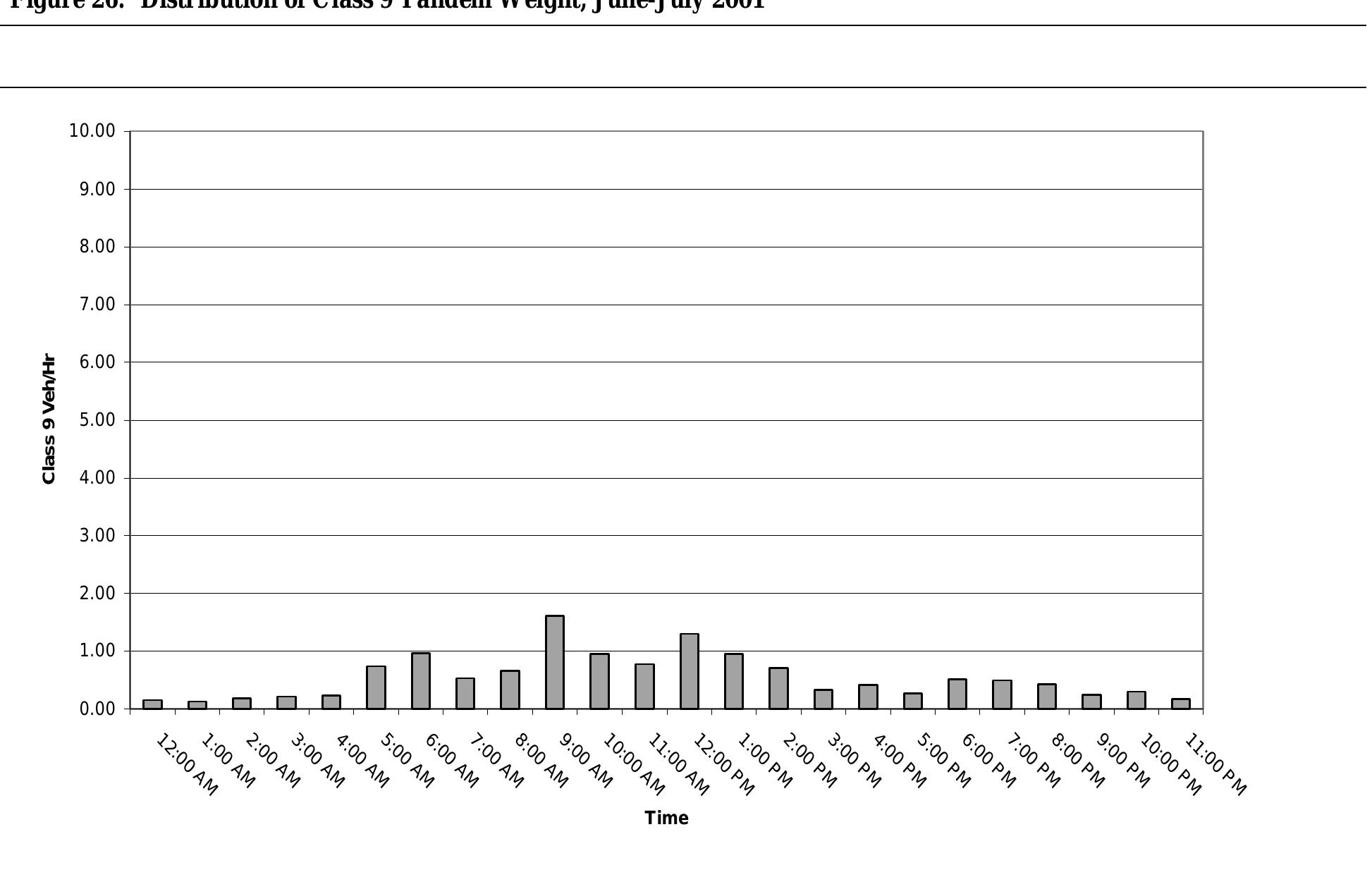
Prepared in cooperation with the Indiana Department of Transportation and Federal Highway Administration. Figure 5-4: Driver Vehicle Inspection Report of vehicle impounded by ISP Officer Henry Davis onJ une 01, 2001, Figure 1-1: Indiana State Police Commercial Vehicle Enforcement Division Officers Ligget, Boruff, and Buffum with INDOT official Jay Wasson in front of an illegally loaded (111,350-Lb) steel hauler, caught August 10, 2000. Figure 1-2: Lowell, Indiana static scales on I-65 Southbound until part (or all) of the load is removed to make the vehicle legal. Figure 1-3: Truck being weighed on L owell static scales Figure 1-4: Indiana State Police M otor Carrier Officer Monty Buffum records vehicle weights at the Lowell Scales Figure 1-5: Lowell scale weight display panel Figure 1-6: Haenni WL 101 (portable) Wheel Load Scale Figure 1-7: Weighing truck with Haenni scales Table 2-1; Load Equivalency Factors for various Single Axle and Tandem Weights Figure 2-1: ESAL v. Axle Weights for Single and Tandem Axles Figure 2-2: Screen capture of Microsoft EXCEL Spreadsheet, set up for calculation of Pavement Life Vehicular Weights (GVW) and individual axles of each class. Figure 2-3: Screen Capture of Class 9 Vehicle ESAL sheet unique class sheets are only used for formula reference. Figure 2-5: Pavement Life Expectancy with 14% of vehicles 1.2 * Legal Limit Figure 3-1: Piezoelectric WIM site configuration Figure 3-2: Piezo-electric WIM in pavement on I-65 NB, near Lafayette, IN Figure 3-3: A technician installs a piezo-electric sensor Figure 3-4: Single Load Cell site configuration Figure 3-5: Single load cells in each lane, I-74 WB, near Covington, IN Figure 3-6: Front axle of truck passing over Bending Plate Figure 3-7: Failed Bending Plate Installation at WIM 5450 Filled with Asphalt Figure A-13: Stations 4410 & 4420 Six Lane Divided Table A-15: Stations 4410 and 4420 Inventory Figure 3-8: Sample project record for a WIM scale installation Figure 3-9: Station 4250, 1% Error in October 2000 Figure 3-10: Scatter plot for Front Axle loads by lane distribution for station 4110, J uly 200( Figure 4-1: Sample WIM “in-cabinet” computer output screen the sites are included in Appendix A (Table A-1 and Figure A-1). Figure 4-2: Virtual Weigh Station System Hardware Figure 4-3: Virtual Weigh Station Hardware Kit Figure 4-4: Screen Capture of latest version of Road Runner software Figure 4-5: Antenna at WIM Station 4410 on I-65 Northbound at Milepost 253.62 Table 5-1; Class 9 Vehicles, Feb 01 00:00:00 2001 TO Thu Mar 01 00:00:00 2001 - Station 4410, Northbound Table 5-3: February 2001, Northbound, Lane 1, Class 9 Vehicles exceeding 90,000lbs. Table 5-4; February 2001, Northbound, Lane 2, Class 9 Vehicles exceeding 90,000 Lbs. Table 5-5: February 2001, Northbound, Lane 3, Class 9 Vehicles exceeding 90,000 Lbs. Table 5-6: February 2001, Southbound, Lane 1, Class 9 Vehicles exceeding 90,000 Lbs Table 5-7: February 2001, Southbound, Lane 2, Class 9 Vehicles exceeding 90,000 Lbs. Figure 5-1: Overweight Northbound Lane 1, Class 9 Vehicles Figure 5-2: Overweight Southbound Lane 1, Class 9 Vehicles Figure 5-5: Graphical Comparison of Combined WIM to Scale Weight Table 5-8: Combined Results of Enforcement Details Table A-3: List of Abbreviations Used Figure A-2: Schematic Key Table A-6: Station 4130 Inventory Figure A-6: Station 4150 Four Lane Divided Figure A-7: Station 4240 Four Lane Divided Table A-9: Station 4240 Inventory Figure A-8: Station 4250 Four Lane Divided Figure A-9: Station 4260 Four Lane Divided Table A-11: Station 4260 Inventory Figure A-10: Station 4270 Four Lane Divided Table A-12: Station 4270 Inventory Figure A-11: Station 4280 Four Lane Divided Table A-13: Station 4280 Inventory Figure A-12: Station 4400 Six Lane Divided Table A-14: Station 4400 Inventory Figure A-13: Stations 4410 & 4420 Six Lane Divided Figure A-13: Station 4440 Six Lane Divided Figure A-17: Station 5140 Four Lane Divided Table A-19: Station 5140 Inventory Figure A-18: Station 5240 Four Lane Divided Table A-20: Station 5240 Inventory Figure A-20: Station 5260 Four Lane Divided Table A-22: Station 5260 Inventory Table A-23: Station 5270 Inventory Figure A-21: Station 5270 Four Lane Divided Table A-24: Station 5440 Inventory Figure A-22: Station 5440 Four Lane Divided Table A-25: Station 5450 Inventory Figure A-23: Station 5450 Four Lane Divided Figure A-24: Station 5460 Six Lane Divided Table A-26: Station 5460 Inventory Figure A-25: Station 5470 Six Lane Divided Figure A-26: Station 5480 Six Lane Divided Table A-28: Station 5480 Inventory Table A-29: Station 5550 Inventory Figure A-27: Station 5550 Four Lane Divided Table A-30: Station 6130 Inventory Figure A-28: Station 6130 Four Lane Divided Figure A-29; Station 6140 Four Lane Divided Table A-35: Station 6250 Inventory Figure A-33: Station 6250 Four Lane Divided Table A-36: Station 6260 Inventory Figure A-34:; Station 6260 Four Lane Divided Figure A-35: Station 6270 Four Lane Divided Table A-37: Station 6270 Inventory Figure A-36: Station 6280 Two Lane Undivided Table A-39: Station 6290 Inventory Figure A-38: Station 6420 Four Lane Divided Figure A-39: Station 7300 Four Lane Divided Table A-42: Station 7320 Inventory Figure A-40: Station 7320 Four Lane Divided Figure A-41: Station 7340 Four Lane Divided Figure B-1; Comparison of Test Weights 01-04-01 at Covington WIM 5130 Figure C-1: Lowell Scale Diversion Routes Figure D-1: Common C onfigurations of Kistler Sensors Figure D-3: Common C onfiguration of Bending Plate Scale Table D-1: WIM Technology Comparison Figure E-37: Error Rate of individual lanes at station 4110 Figure E-38: Error Rate of individual lanes at station 4130 Figure E-39: Error Rate of individual lanes at station 4140 Figure E-40: Error Rate of individual lanes at station 4150 Figure E-41; Error Rate of individual lanes at station 4240 Figure E-42: Error Rate of individual lanes at station 4250 Figure E-43: Error Rate of individual lanes at station 4260 Figure E-44; Error Rate of individual lanes at station 4270 Figure E-45; Error Rate of individual lanes at station 4280 Figure E-46: Error Rate of individual lanes at station 4400 Figure E-48: Error Rate of individual lanes at station 5110 Figure E-49: Error Rate of individual lanes at station 5120 Figure E-50: Error Rate of individual lanes at station 5130 Figure E-51: Error Rate of individual lanes at station 5140 Figure E-52: Error Rate of individual lanes at station 5240 Figure E-53: Error Rate of individual lanes at station 5250 Figure E-55: Error Rate of individual lanes at station 5270 Figure E-56: Error Rate of individual lanes at station 5440 Figure E-57: Error Rate of individual lanes at station 5450 Figure E-58: Error Rate of individual lanes at station 5460 Figure E-59: Error Rate of individual lanes at station 5470 Figure E-60: Error Rate of individual lanes at station 5480 Figure E-61: Error Rate of individual lanes at station 5550 Figure E-62: Error Rate of individual lanes at station 6130 Figure E-63: Error Rate of individual lanes at station 6140 Figure E-64: Error Rate of individual lanes at station 6150 Figure E-65: Error Rate of individual lanes at station 6160 Figure E-66: Error Rate of individual lanes at station 6170 Figure E-67: Error Rate of individual lanes at station 6250 Figure E-70: Error Rate of individual lanes at station 6280 Figure E-71: Error Rate of individual lanes at station 6290 Figure E-72: Error Rate of individual lanes at station 6420 Figure F-1: Station 4110, Class 9 Vehicles - Front Axle Load Distribution Figure F-3: Station 4130, Class 9 Vehicles - Front Axle Load Distribution Figure F-4; Station 4130, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-5: Station 4140, Class 9 Vehicles - Front Axle Load Distribution Figure F-6: Station 4140, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-7: Station 4160, Class 9 Vehicles - Front Axle Load Distribution Figure F-8: Station 4160, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-9: Station 4240, Class 9 Vehicles - Front Axle Load Distribution Figure F-10: Station 4240, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-11: Station 4250, Class 9 Vehicles - Front Axle Load Distribution Figure F-12: Station 4250, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-13: Station 4260, Class 9 Vehicles - Front Axle Load Distribution Figure F-14: Station 4260, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-15: Station 4270, Class 9 Vehicles - Front Axle Load Distribution Figure F-16: Station 4270, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-17: Station 4280, Class 9 Vehicles - Front Axle Load Distribution Figure F-18: Station 4280, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-19: Station 4440, Class 9 Vehicles - Front Axle Load Distribution Figure F-20: Station 4440, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-21: Station 5110, Class 9 Vehicles - Front Axle Load Distribution Figure F-22: Station 5110, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-23: Station 5120, Class 9 Vehicles - Front Axle Load Distribution Figure F-24:; Station 5120, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-25: Station 5140, Class 9 Vehicles - Front Axle Load Distribution Figure F-26: Station 5140, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-27: Station 5240, Class 9 Vehicles - Front Axle Load Distribution Figure F-28: Station 5240, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-29: Station 5250, Class 9 Vehicles - Front Axle Load Distribution Figure F-30: Station 5250, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-31: Station 5260, Class 9 Vehicles - Front Axle Load Distribution Figure F-32: Station 5260, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-33: Station 5270, Class 9 Vehicles - Front Axle Load Distribution Figure F-34: Station 5270, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-35: Station 5440, Class 9 Vehicles - Front Axle Load Distribution Figure F-36: Station 5440, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-37: Station 5440, Class 9 Vehicles - Front Axle Load Distribution Figure F-38: Station 5450, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-39: Station 5460, Class 9 Vehicles - Front Axle Load Distribution Figure F-40: Station 5460, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-41: Station 5470, Class 9 Vehicles - Front Axle Load Distribution Figure F-42: Station 5470, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-43: Station 5480, Class 9 Vehicles - Front Axle Load Distribution Figure F-44:; Station 5480, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-45: Station 5550, Class 9 Vehicles - Front Axle Load Distribution Figure F-46: Station 5550, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-47: Station 6130, Class 9 Vehicles - Front Axle Load Distribution Figure F-48: Station 6130, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-49: Station 6140, Class 9 Vehicles - Front Axle Load Distribution Figure F-50: Station 6140, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-51: Station 6150, Class 9 Vehicles - Front Axle Load Distribution Figure F-52: Station 6150, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-53: Station 6160, Class 9 Vehicles - Front Axle Load Distribution Figure F-55: Station 6170, Class 9 Vehicles - Front Axle Load Distribution Figure F-56: Station 6170, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-57: Station 6250, Class 9 Vehicles - Front Axle Load Distribution Figure F-58: Station 6250, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-59: Station 6260, Class 9 Vehicles - Front Axle Load Distribution Figure F-60: Station 6260, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-61: Station 6270, Class 9 Vehicles - Front Axle Load Distribution Figure F-62: Station 6270, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-63: Station 6280, Class 9 Vehicles - Front Axle Load Distribution Figure F-64:; Station 6280, Class 9 Vehicles - Gross Vehicle Weight vs. Front Axle Figure F-65: Station 6290, Class 9 Vehicles - Front Axle Load Distribution Figure F-67: Station 6420, Class 9 Vehicles - Front Axle Load Distribution Table G-1: WIM #4410 Comparison to Portable Scales Test Results, 3-23-01 Figure G-1; WIM #4410 Comparison to Portable Scales Test Results, 3-23-01 Table H-1: Average Class 9 Front Axle Weight for All WIM Lanes, Sorted by Front Axle Weight (33,689-10,398) Table H-2: Average Class 9 Front Axle Weight for All WIM Lanes, Sorted by Front Axle Weight (10,285-7,200) Table H-3: Average Class 9 Axle Weight for All WIM Lanes, Sorted by Front Axle Weight (6,310-1,001) Table H-4: Average Class 9 Axle Weight for All WIM Lanes, Sorted by Front Axle Weight (986-308) Figure H-1; Average Class 9 Front Axle Weight for All WIM Lanes Table H-5: Average Class 9 Front Axle Weight for All WIM Lanes, Sorted by Number and Lane (4110-4280) Table H-6: Average Class 9 Front Axle Weight for All WIM Lanes, Sorted by Number and Lane (4400-5460) Table H-7: Average Class 9 Front Axle Weight for All WIM Lanes, Sorted by Number and Lane (5470-6250) Table H-8: Average Class 9 Front Axle Weight for All WIM Lanes, Sorted by Number and Lane (6270-7340) Table H-12: Average Class 9 Front Axle Weight for WIM lanes with GVW <32,000, Sorted by Site Number (6270-7340) Table H-13: Average Class 9 Front Axle Weight for WIM lanes with 32,000<G VW <70,000, Sorted by Site Number (4110- 5450) Table H-14: Average Class 9 Front Axle Weight for WIM lanes with 32,000<G VW <70,000, Sorted by Site Number (5470- 7340) Figure H-3: Average Class 9 Front Axle Weight for WIM Lanes with 32,000 <GVW < 70,000 Table H-16: Average Class 9 Front Axle Weight for WIM lanes with GVW >70,000, Sorted by Site Number (5480-7340) Figure H-4: Average Class 9 Front Axle Weight for WIM lanes with GVW > 70,000 Table H-18: Evaluation of WIM Performance (Stations 4110-5240) Table H-19: Evaluation of WIM Performance (Stations 5250-7340) Figure I-1: March 29, 2001 - Merrillville Scale Detail (WIM 4410) - WIM v. Static graph Table I-1: March 29, 2001 - Merrillville Scale Detail (WIM 4410) - WIM v. Static Figure I-2: May 8, 2001 - Merrillville Scale Detail (WIM 4410) - WIM v. Static graph Table I-2: May 8, 2001 - Merrillville Scale Detail (WIM 4410) - WIM v. Static Table I-3: May 15, 2001 - Merrillville Scale Detail (WIM 4410) - WIM v. Static Figure I-3: May 15, 2001 - Merrillville Scale Detail (WIM 4410) - WIM v. Static graph Figure I-4: May 18, 2001 - Merrillville Scale Detail (WIM 4410) - WIM v. Static graph Table I-4: May 18, 2001 - Merrillville Scale Detail (WIM 4410) - WIM v. Static Table I-5: May 21, 2001 - Merrillville Scale Detail (WIM 4410) - WIM v. Static Figure I-5: May 21, 2001 - Merrillville Scale Detail (WIM 4410) - WIM v. Static graph Table I-6: May 23, 2001 - Merrillville Scale Detail (WIM 4410) - WIM v. Static Figure I-6: May 23, 2001 - Merrillville Scale Detail (WIM 4410) - WIM v. Static graph Figure I-7: May 31, 2001 - Merrillville Scale Detail (WIM 4410) - WIM v. Static graph Table I-7: May 31, 2001 - Merrillville Scale Detail (WIM 4410) - WIM v. Static Table 2: SR 1 WIM Station, Northbound. Table 3: Average Front Axle and GVW Weights. Figure 1: Southbound Class 9 Volume on SR 1 for March 18 to May 30, 2001 Figure 2: Southbound Class 9 Volume on SR 1 with GVW >80,000lbs for March 18 to May 30, 2001 Figure 3: Northbound Class 9 Volume on SR 1 for March 18 to May 30, 2001 Figure 4: Northbound Class 9 Volume on SR 1 with GVW >80,000lbs for March 18 to May 30, 2001 Figure 6: Average Hourly Southbound Class 9 Volume with GVW >80,000 on SR 1 for March-May, 2001 Figure 5: Average Hourly Southbound Class 9 Volume on SR 1 for March-May, 2001 Figure 7; Average Hourly Northbound Class 9 Volume on SR 1 for March-May, 2001 Figure 8: Average Hourly Northbound Class 9 Volume with GVW >80,000 on SR 1 for March-May, 2001 Figure 9: Average Class 9 Front Axle Weight Distribution on SR 1 for March-May, 2001 Figure 11: Distribution of Class 9 GVW, Zoomed in graph of same data shown in Figure 10. Figure 13: Distribution of Class 9 Tandem Weight, March 18-May 30, 2001. Figure 14: Distribution of Southbound Class 9 Tandem Over weights by hour, March-May, 2001. Table 4; Average Front Axle and GVW Weights J une-J uly 2001 Table 3: Average Front Axle and GVW Weights March 18-May 2001 Figure 1: Southbound Class 9 Volume on SR 1 for March 18 to May 2001 Figure 2: Southbound Class 9 Volume on SR 1 with GVW >80,000 for March 18 to May 2001 Figure 4: Northbound Class 9 Volume on SR 1 with GVW >80,000 for March 18 to May 2001 Figure 5: Average Hourly Southbound Class 9 Volume on SR 1 for March 18 to May 2001 Figure 6: Average Hourly Southbound Class 9 Volume with GVW >80,000 on SR 1 for March 18 to May 2001 Figure 7; Average Hourly Northbound Class 9 Volume on SR 1 for March18 to May 2001 Figure 8: Average Hourly Northbound Class 9 Volume with GVW >80,000 on SR 1 for March 18 to May 2001 Figure 9: Average Class 9 Front Axle Weight Distribution on SR 1 for March 18 to May 2001 Figure 12: Distribution of Class 9 Axle Weight, March 18 to May 2001 Figure 13: Distribution of Class 9 Tandem Weight, March 18 to May 2001 Figure 14: Average Hourly Southbound Class 9 Volume with Tandem>34,000 on SR1 for March 18 to May 2001 Figure 15: Southbound Class 9 Volume on SR 1 for J une-J uly 2001 Figure 16: Southbound Class 9 Volume on SR 1 with GVW >80,000 for J une-J uly 2001 Figure 17: Northbound Class 9 Volume on SR 1 for J une-J uly 2001 Figure 18: Northbound Class 9 Volume on SR 1 with GVW >80,000 for J une-J uly 2001 Figure 19: Average Hourly Southbound Class 9 Volume on SR 1 for J une-J uly 2001 Figure 20: Average Hourly Southbound Class 9 Volume with G VW >80,000 on SR 1 for J une-J uly 2001 Figure 21; Average Hourly Northbound Class 9 Volume on SR 1 for J une-J uly 2001 Figure 22: Average Hourly Northbound Class 9 Volume with GVW >80,000 on SR 1 for J une-J uly 2001 Figure 23: Average Class 9 Front Axle Weight Distribution on SR 1 for J une-J uly 2001 Figure 25: Distribution of Class 9 Axle Weight, J une-J uly 2001 Figure 24: Distribution of Class 9 GVW, J une-J uly 2001 Figure 26: Distribution of Class 9 Tandem Weight, J une-J uly 2001 Figure 27: Average Hourly Volume of Southbound Class 9 Tandem > 34,000 on SR1 for J une-J uly 2001 Table 1; SR 1 WIM Station, Southbound. Table 2: SR 1 WIM Station, Northbound. Violations will be indicated on the image in the following manner: On September 18”, 2001 Officer Monty Buffum arranged a detail at the US 24 WIM sight (designated WIM site 2400 by INDOT) East of Fort Wayne to test the wireless communication link, laptop software, and WIM accuracy. Andrew Nichols from Purdue accompanied Officer Buffum. The following table summarizes the six samples that were obtained. Figure 1: WIM monitoring site. Figure 2: WIM scales (during construction ~J uly 2001). Figure 4: Truck inspection site. Based on this data, itis proposed that the EB lane be adjusted - 7.7% and the WB lane be adjusted 43.9%. Table 2: Eastbound US 24 WIM Station Data C ollected Figure 2: Eastbound US 24 WIM Station Data Accuracy Plot & Calibration Adjustment Figure 1: Average Hourly Class 9 Volume on US 24 with GVW Exceeding 80,000 lb (adjusted) In general, the WB direction has a higher volume of overweight trucks. According to Figure 1, the time periods with the highest number of overweight trucks is 8:00am - 10:00am, 11:00am-12:00pm. According to Figure 2, the day with the highest number of overweight trucks is Wednesday. Figure 2: Average Daily Class 9 Volume on US 24 with GVW Exceeding 80,000 lb (adjusted) Figure 3: Daily Class 9 Volume on US 24 with GVW Exceeding 80,000 lb (adjusted) Figure 1: Northbound I-65 WIM Station Data Accuracy Plot Table 1. Northbound I-65 WIM Station Data Collected April 12, 2002 Table 1: Comparison of April 2001 with J uly 2001 Data. Table 1: Summary of Class 9 Vehicle Data J anuary 16 - March 31, 2002, Figure 3: Eastbound GVW Violations by Day of the Month Figure 4: Westbound GVW Violations by Day of the Month Figure 6: Westbound Average GVW Violations by Day of the Week Figure 5: Eastbound Average GVW Violations by Day of the Week
Electronic weighing technology presents management with rapid, timely and accurate information that provides quick turnaround times for customers. Its popularity can be attested by its use in all the sectors of the industry. In fact, its spectrum of use spans from the traditional retail industry, to manufacturing and warehousing, to postal, health and transport industry. Ordinary microprocessor based weighing systems that utilize single point load cells, have a huge circuitry and hence render them complex to design and implement. They further have low speed and resolution. One other class of microprocessor based weighing balances utilizes faster microprocessors and has relatively high resolution. These devices often have a prohibitive price tag, as they comprise many external devices/chips. Another type of electronic weighing system utilizes a microcontroller and an 8-bit analogue-to-digital converter. It has in-built memory units to store program, data and variables. In both cases, there is compromise between range and resolution. This research work describes the design and implementation of a low-cost, high-resolution and portable digital electronic weighing system ideal for domestic, laboratory and commercial use. The system has highly reduced circuitry as it utilizes a standalone microcontroller chip. It essentially comprises of an 8-bit 8051 microcontroller with a local memory module for storing data from the ADC. High resolution, without compromising range, is achieved by designing a program for interfacing a serial 10-bit ADC to the 8-bit microcontroller. This is due to the in-built Serial Programming Interface (SPI) of the microcontroller used. The developed electronic weighing balance senses, measures and displays the mass, placed on a single point load cell, on an LCD display. The system fabricated measures weights ranging from 0-19 kg.
The Oak Ridge National Laboratory (ORNL) has been involved in Weigh-in-Motion (WIM) Research with both government agencies and private companies since 1989. The discussion here will focus on the United States Army's need for an automated system to weigh and determine the center-of-balance for military wheeled vehicles as it relates to deployments for both military and humanitarian activities. A demonstration test at Fort Bragg/Pope AFB of ORNL's first generation portable Weigh-in-Motion (WIM Gen I) will be discussed as well as the development and fielding activities for a WIM Gen II system.
The paper deals with a real-time Multi-Sensor Weigh -In -Motion System (MS-WIM). This system was designed in Poland over a period of 3 years from 2003 to 2006. The embodied system is equipped with 16 piezoelectric load sensors, in the form of narrow 4m long strips, provided by Measurement Specialties. The paper outlines the system structure and its elements i.e. the weighing site, the data acquisition system and data processing software. Experimental tests indicate that the designed MS-WIM system falls in accuracy class B+(7) in the speed range from 30km/h to 80 km/h.
Advanced Topics in Optoelectronics, Microelectronics, and Nanotechnologies VII, 2015
Research and design engineers usually use three sources of information: analytic models, numerical models and experimental studies. Analytic and numerical models are theoretical models which must be calibrated and verified regarding the accuracy of their results using the data acquired from experimental studies. If these models are deeply integrated from the beginning, the overview result is a hybrid model. From this standpoint, the paper presents the underlying concepts and studies employed to create a hybrid model of a weighting device. The paper presents the analytic background of the problem to be solved, the numerical model and the dimensioning of the experimental device. The study is still in progress, the following stages being the manufacturing of the device and calibration of the weighting platform.
The transition of an astronaut into zero gravity leads to a certain restructuring of the body, including the redistribution of fluid flows in it. The process of dehydration of the body is stimulated, the astronaut loses weight. Knowledge of the regularities of changes in an astronaut's body weight, keeping it within normal limits thanks to a rational load distribution, rest, physical exercises, and a well-thought-out diet are extremely necessary in order to provide the astronaut with the most favorable conditions for adaptation in zero gravity, as well as to better prepare him for his return to Earth. Returning materials for scientific research and experiments, as well as equipment, from the space station to Earth also requires high-precision determination of the low weight of objects. The object of the research is an experimental unit that allows measuring the weight (parameters) of the astronaut’s body and the small weight of objects (equipment, devices, etc.) that oscillate. ...
Several methods have been used for calibrating weigh-in-motion (WIM) systems. One difference between the methods is in the formula used to make the calibration. A systematic approach is taken here in deriving and comparing four calibration methods. Adjustments of WIM data beyond calibration may be used to more closely emulate the properties of static weight data, such as in equivalent axle load calculations. Several adjustments of WIM data are also derived. Examples are given of the vanous methods of calibrating and adjusting WIM data.
Federal and State agencies need certifiable vehicle weights for various applications, such as highway inspections, border security, check points, and port entries. ORNL weigh-in-motion (WIM) technology was previously unable to provide certifiable weights, due to natural oscillations, such as vehicle bouncing and rocking. Recent ORNL work demonstrated a novel filter to remove these oscillations. This work shows further filtering improvements to enable certifiable weight measurements (error < 0.1%) for a higher traffic volume with less effort (elimination of redundant weighing).
Abstract : This paper presents the development of an electronic weighing indicator for digital measurement. The objectives of the system were to read weight measured in the conventional analog form to digital form, achieve high precision in measurement and calibration. This components used for this research are Load Cell, Hx711 Load Cell amplifier, Arduino Uno Microcontroller, and an LCD module. In this research, a 40kg load cell is used. The load cell sends output signals of the mechanical weights measured to the Hx711 module which amplifies and sends the output to the arduino microcontroller. The microcontroller calibrates the output signal with the aid of the load cell amplifier module before sending the signal which is already converted to digital form to the LCD module for display. The system developed has proved that a digital electronic weighing system can be low cost, miniaturized, detached and can take accurate readings devoid of errors Keywords: Conventional, Analog, Digital, Precision, Calibration, Load Cell, Microcontroller, Arduino, Mechanical
Vice-chair of COST323 (WIM), delegate for COST345 and COST341. Member of WAVE and SAMARIS projects. Member of Scientific Committees of 1 st , 2 nd and 3 rd WIM conferences.
The development of an efficient Weigh-In-Motion (WIM) system, with the aim of estimating the axle loads of railway vehicles in motion, is quite interesting from both an industrial and academic point of view. Such systems, with which the loading conditions of a wide population of running vehicles can be verified, are very important from a safety and maintenance perspective. The evaluation of the axle load conditions is fundamental especially for freight wagons, more likely to be subjected at risk of unbalanced loads that may be extremely dangerous both for the vehicle running safety and the infrastructure integrity. In this way, potentially dangerous overloads or defect of rolling surfaces could be easily identified: in case of measured overloads, the axle could be identified and monitored with non-destructive controls to prevent the propagation of potentially dangerous fatigue cracks. Also peaks on the measured contact forces could be caused by wheel flats or other kinds of damages of the rolling surfaces which could be early identified saving both vehicle and railway line from the dangerous consequence of a prolonged exposure to irregular loads. As a consequence the WIM system could be used both as Prognostic and Diagnostic tool thanks to its capability of early identifying a minor fault condition which could cause, if ignored, potentially catastrophic events. The development, the simulation and the validation of the innovative WIM algorithm aimed at estimating the axle loads of railway vehicles will be presented in this paper. The innovative algorithm have been preliminary validated using experimental data provided by Ansaldo STS and further trained on FEM simulation results. Obtained results are quite encouraging considering that experimental results have been optained with an experimental layout optimized for a different WIM algorithm previously developed by Ansaldo STS which, after the comparison, turned out to be inferior both in terms of performances and reliability.
ABUAD Journal of Engineering Research and Development (AJERD)
Analog weighing scales suffer from a lack of precision while reading the output and they can easily be manipulated by any technically biased individual. This paper presents the development of an automated estimating electronic weighing indicator. It aims at developing a means to a framework to evaluate estimated weight in analogue to digital forms, such as to obtain higher precision in estimation and calibration. The circuit consists of a Load Cell, Hx711 Load Cell amplifier, Atmega328 microcontroller, LCD module and a few additional glue components. The 20 kg load cell sends signals of the projected loads to the Hx711 module, which magnifies and sends the corresponding output to the microcontroller. The system uses the 4x3 keyboard to input the unit cost per kg to the electronic scale. The microcontroller automatically adjusts the signals with the load cell amplifier module's guide, thus sending the estimated cost in digital form to the LCD module for display. The circuit was d...
Weigh-In-Motion (WIM) systems provide information on the state of road traffic and are used in activities undertaken as part of traffic supervision and management, enforcement of applicable regulations, and in the design of road infrastructure. The further development of such systems is aimed at increasing their measurement accuracy, operational reliability, and their resistance to disturbing environmental factors. Increasing the accuracy of measurement can be achieved both through actions taken in the hardware layer (technology of load sensors, the number of sensors and their arrangement, technology used in the construction of the pavement, selection of the system location), as well as by implementing better system calibration algorithms and algorithms for pre-processing measurement data. In this paper, we focus on the issue of WIM system calibration. We believe that through the correct selection of the calibration algorithm, it is possible to significantly increase the accuracy of...
Machine Tool, In-Line, and Robot Sensors and Controls, 1995
An automated and portable weigh-in-motion system has been developed at Oak Ridge National Laboratory for the purpose of manifesting cargo onto aircraft. The system has an accuracy range of *3.0% to 6. 0 % measuring gross vehicle weight and locating the center of balance of moving vehicles at speeds of 1 to 5 mph. This paper reviews the controlher interface system and weight determination algorithm developed to acquire, process, and interpret multiple sensor inputs. The development effort resulted in a self-zeroing, user-friendly system capable of weighing a wide range of vehicles in any random order. The control system is based on the STANDARD (STD) bus and incorporates customdesigned data acquisition and sensor fusion hardware controlled by a personal computer (PC) based single-board computer. The user interface is written in the "C" language to display number of axles, axle weight, axle spacing, gross weight, and center of balance. The weighing algorithm developed will function with any linear weight sensor and a set of four axle switches per sensor.
Overloaded vehicles pose a real threat to road safety and significantly contribute to the degradation of the road surface. High-Speed Weigh in Motion (HS-WIM) stations are the commonly used method of eliminating them from traffic. In Poland, HS-WIM stations operate in pre-selection mode, sending information to services about the potential exceedance of acceptable standards by a specific vehicle. The article presents the results of the data analysis from selected HS-WIM stations operating on the national road network in Poland indicating significant limitations of the effectiveness of the whole system. The main reason for this may be that carriers use the knowledge about the HS-WIM stations location and working time to avoid inspections. The results presented in the paper indicate, among other things, that in some locations the share of vehicles overloaded with traffic increases significantly outside the working hours of the controlling services. For Light Commercial Vehicle, the sha...
We present breakthrough findings via significant modifications to the Weigh-in-Motion (WIM) Gen II approach, so-called the modified Gen II. The revisions enable slow speed weight measurements at least as precise as in ground static scales, which are certified to 0.1% error. Concomitant software and hardware revisions reflect a philosophical and practical change that enables an order of magnitude improvement to sub-0.1% error in low-speed weighing precision. This error reduction breakthrough is presented within the context of the complete host of commercial and governmental application rationale including the flexibility to extend information and communication technology for future needs.
In many countries, work is being conducted to introduce Weigh-In-Motion (WIM) systems intended for continuous and automatic control of gross vehicle weight. Such systems are also called WIM systems for direct enforcement (e-WIM). The achievement of introducing e-WIM systems is conditional on ensuring constant, known, and high-accuracy dynamic weighing of vehicles. WIM systems weigh moving vehicles, and on this basis, they estimate static parameters, i.e., static axle load and gross vehicle weight. The design and principle of operation of WIM systems result in their high sensitivity to many disturbing factors, including climatic factors. As a result, weighing accuracy fluctuates during system operation, even in the short term. The article presents practical aspects related to the identification of factors disturbing measurement in WIM systems as well as methods of controlling, improving and stabilizing the accuracy of weighing results. Achieving constant high accuracy in weighing veh...
2015 IEEE International Instrumentation and Measurement Technology Conference (I2MTC) Proceedings, 2015
In every country, road networks are one of the largest and highly expensive investment. Equally expensive are the consequences of not ensuring adequate road safety. This creates the need for an efficient and automatic system for the detection of overloaded vehicles [17]. One of the tools designed to measure the weight and individual axle loads of vehicles are the systems weighing vehicles in motion (WIM). Due to their measurement imprecision, WIM systems composed of two lines of sensors are only used as pre-selection systems. At present, the only viable option for reducing measurement uncertainty in dynamic weighing is to increase number of load sensors (Multi-Sensor systems; MS-WIM). The paper presents the results of research on a MS-WIM system equipped with 16 lines of load sensors. The conceptual objectives, system design, results of experimental evaluation of the system's accuracy, and the final conclusions based on a 6-year operating period, during which the system has been used under normal traffic conditions have been presented.
 Jay Wasson
Jay Wasson