Boubaker Krim
Boubaker KrimAbstract
Robustness is of crucial importance in control systems design, because real engineering systems are vulnerable to external disturbance and measurement noise, and there are always discrepancies between mathematical models used for design and the actual system in practice. Typically a control engineer is required to design a controller which will make the closed loop system stable and achieve certain performance levels in the presence of disturbance signals, noise interference, unmodeled plant dynamics and plant parameter variations. The purpose of this book is to help post-graduate students and control engineers learn how to use well-developed, advanced robust control system design methods and the state-of-the-art MATLAB® tools in practical design cases.
Figures (389)








![The block diagram in Fig. 2.12 can be generalized to be a standard configuration to represent how the uncertainty affects the input/output relationship of the control system under study. This kind of representation first appeared in the circuit analysis back in the 1950s [140, 141]. It was later adopted in the robust control study [145] for uncertainty modeling. The general framework is depicted in Fig. 2.13. The interconnection transfer function matrix M in Fig. 2.13 is partitioned as](https://figures.academia-assets.com/36523391/figure_009.jpg)



























































































































































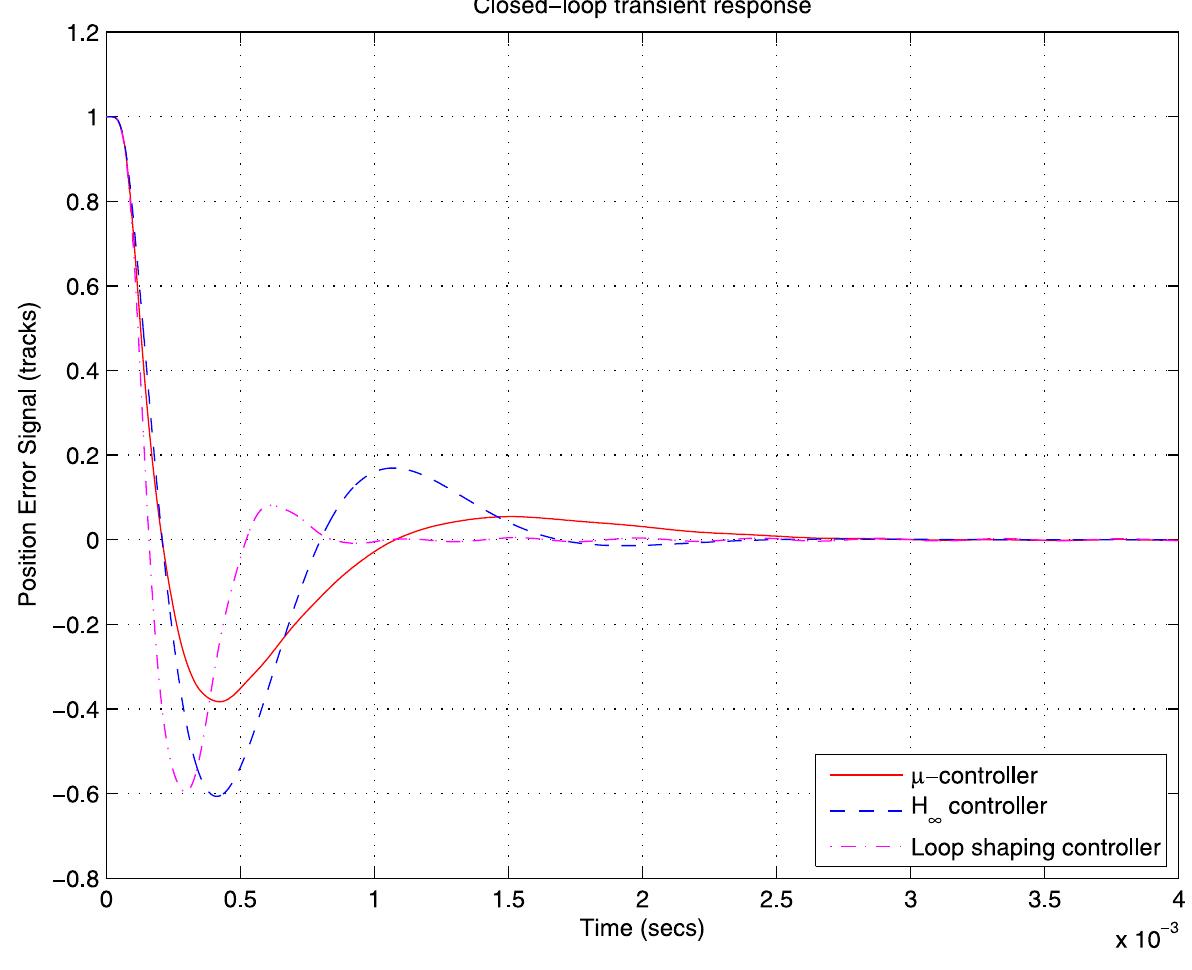









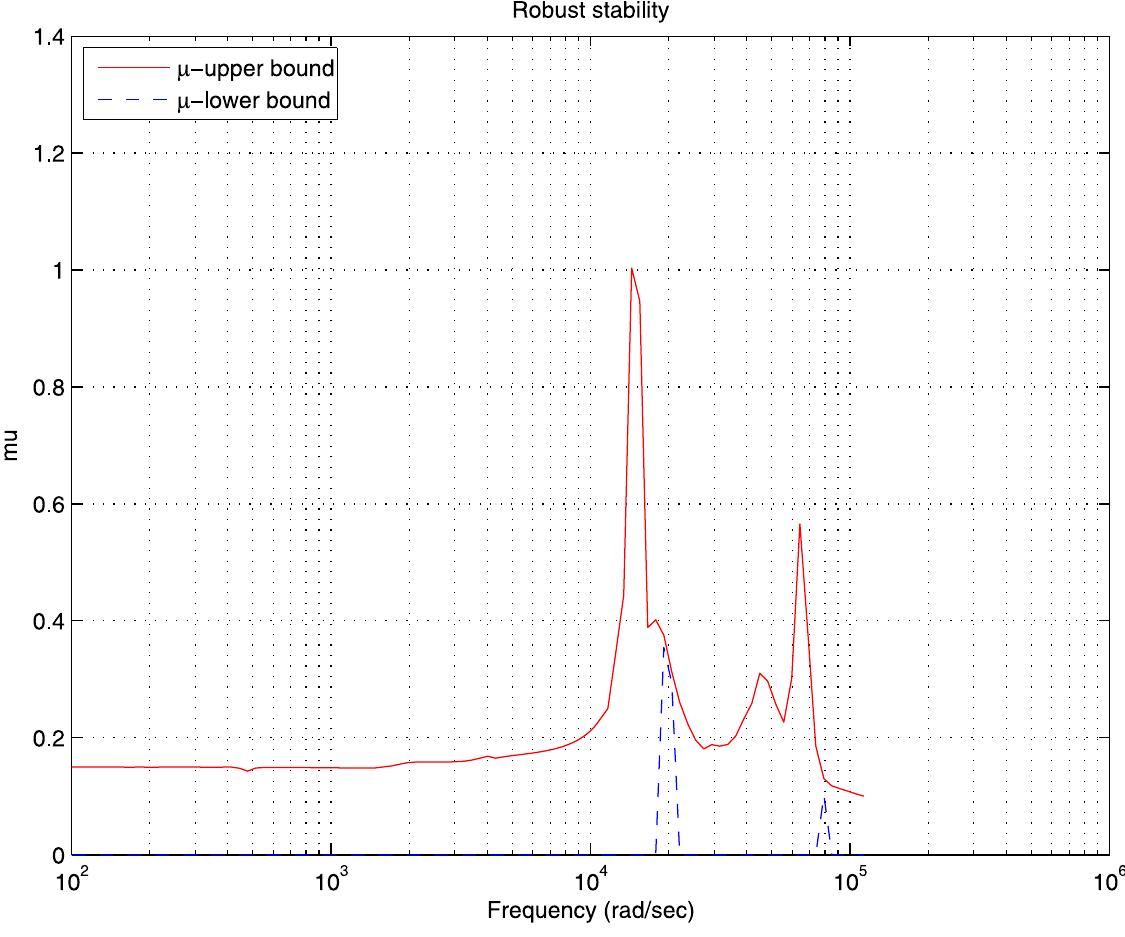
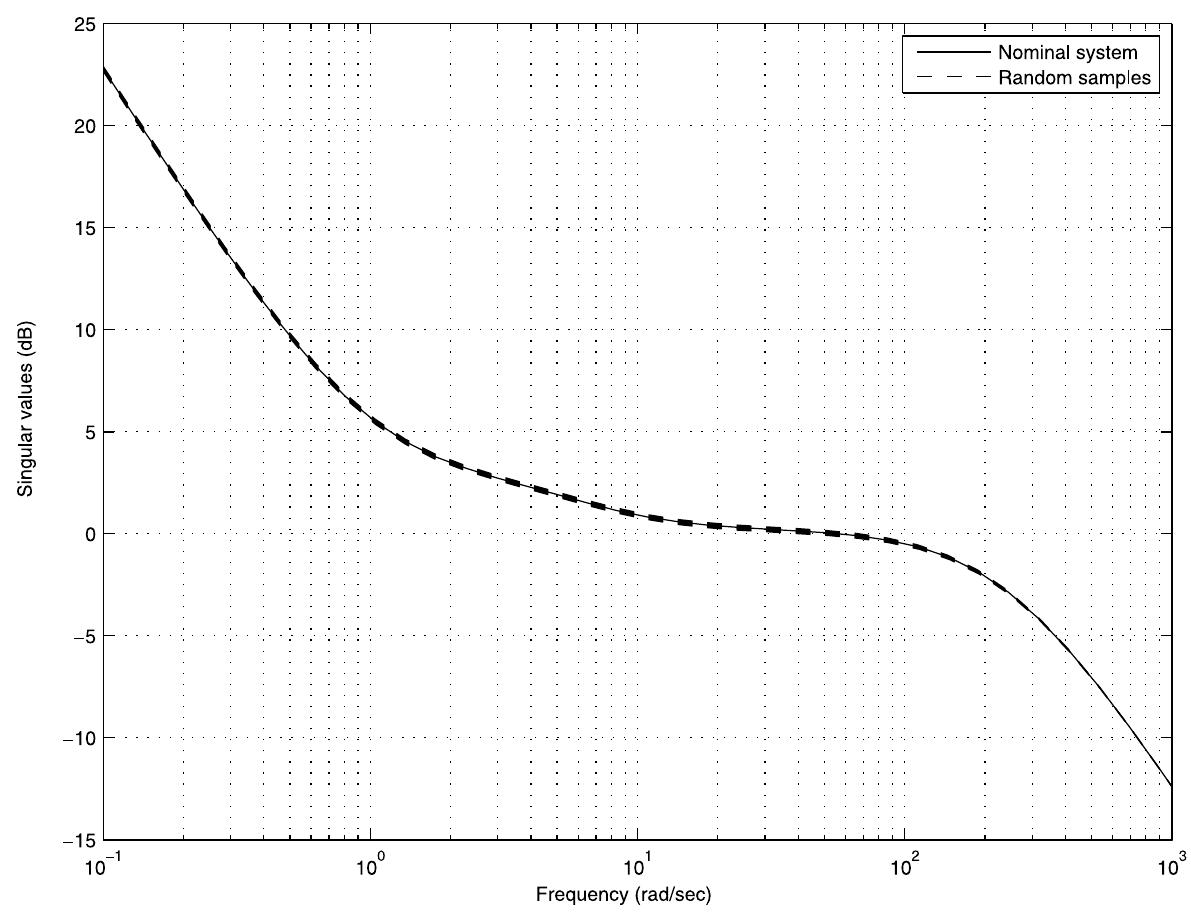
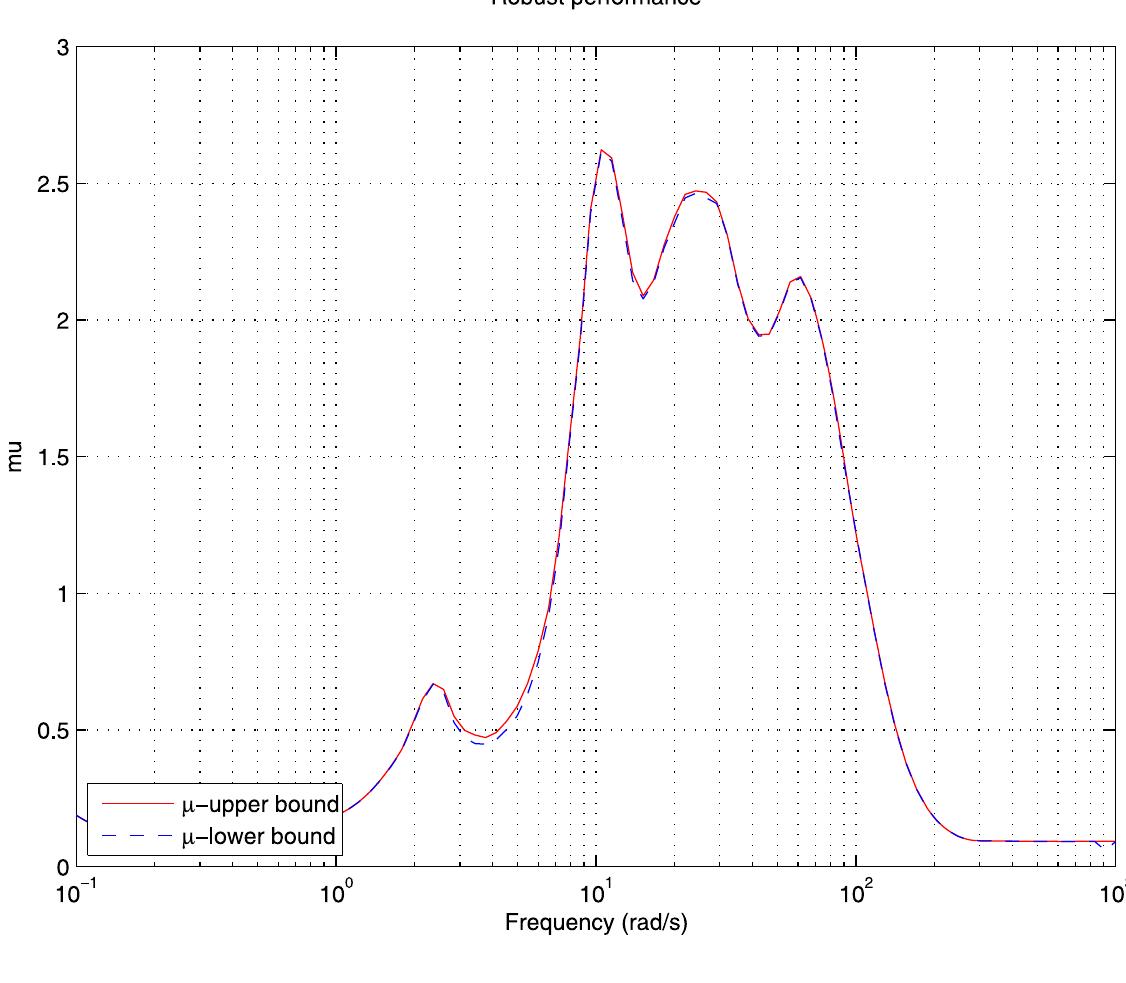
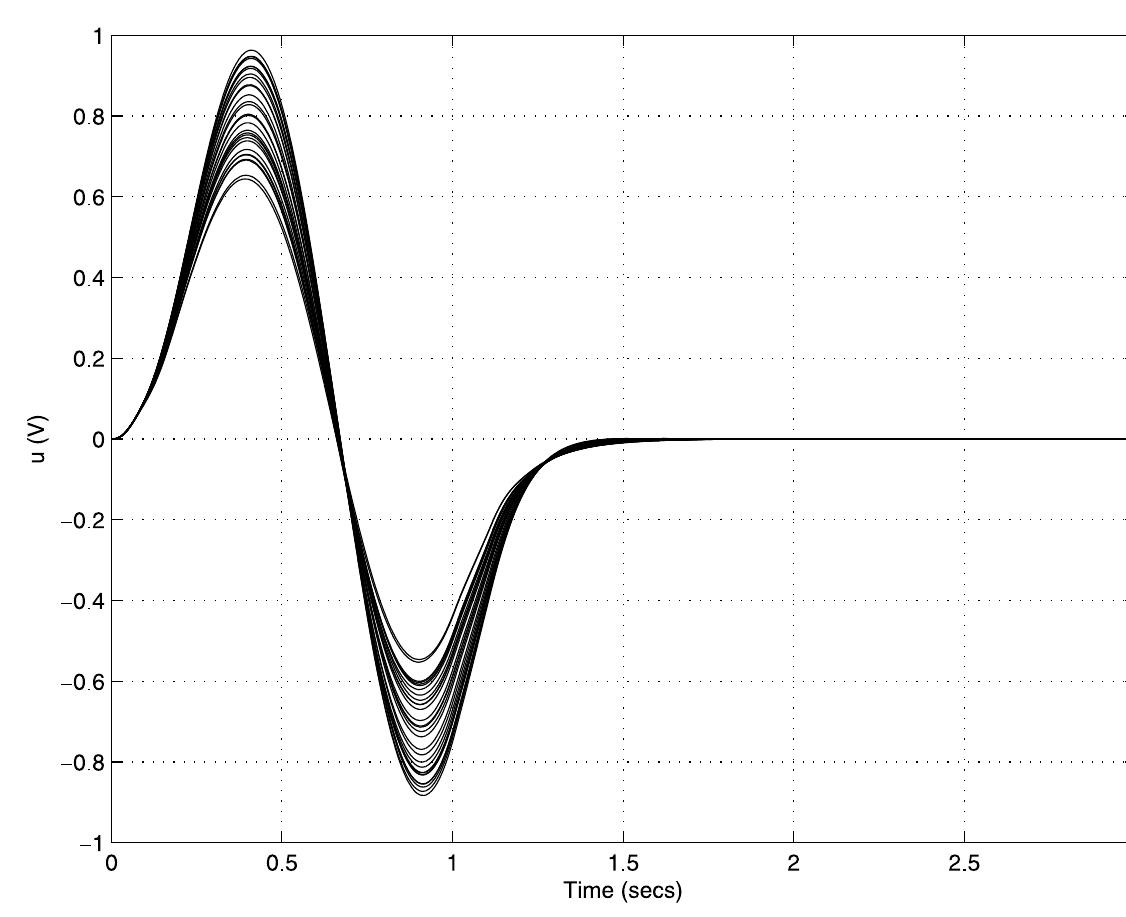
![QAUIUILY dildlysis dll LODUSLE PECIIOTIMANCe dallalyosis, LOspCCuvely, i VOUT PlOls UI orst results are seen around the second resonant frequency of 2.2 kHz. The transient responses of the closed-loop system for 30 random combination: f the uncertain parameters are obtained by the file ds1_hdd.m, which imple ents the function sdlsim. The function sdlsim also computes the control ac on signal obtained at the output of the digital-to-analog converter. The closed-loo] ansient response is shown in Fig. 14.43 and the corresponding control action i ig. 14.44. The undershoot for all parameter values is less than 50 % and the maxi lum magnitude of the control signal is 1 V. The transient response to disturbance is shown in Fig. 14.45. Overall, the result: ptained are almost as good as the results obtained with the continuous-time, ju wa](https://figures.academia-assets.com/36523391/figure_179.jpg)













































































































































































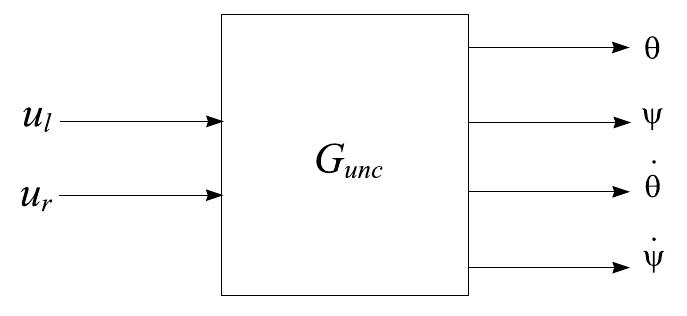
![In this chapter we present the design of a robust controller for NXTway-GS robot with the aim to implement in maximum degree the available software for real-time control presented in [188]. Since the robust controllers are of higher order the basic problem is to check the possibility to implement such controllers on the available microcontroller working with sampling frequency jf; = 250 Hz in the stabilization loop. The results obtained show that the microcontroller under consideration im- plements without difficulties a robust discrete controller of 12th order that allows to improve the closed-loop system performance. Results from the simulation of the closed-loop system as well as experimental results obtained during the real imple- mentation of the controller designed are given.](https://figures.academia-assets.com/36523391/figure_351.jpg)